Mochuan MV series plc GEAR1 описание инструкции
ПЕРЕДАЧА1
C_GEAR1 Дн Мн
/**
Б[0] //Включение электронного редуктора Постоянно давайте 1, чтобы запустить всю функцию, дайте 0, чтобы приостановить функцию.
Б[1] //Исполнение компенсации Скачки от 0 до 1 компенсируются один раз (при включенном электронном редукторе)
БИ 2] //Направление компенсации 1 вперед 0 назад
Б[3] //быть 1, чтобы включить виртуальный шпиндель 1 для запуска виртуальной оси, 0, чтобы фактическое значение энкодера было передано в DW[10]
Б[4] (Монитор) // Бит флага выполнения компенсации
Б[5] (монитор)//здесь предупреждение
Б[6] // переход от 0 к 1, данная позиция очищает 0.
Б[7] //Выбор режима 0 для режима без разгона/торможения, 1 для электронного редуктора ускорение/торможение останов старт
Б[8] //Стартовый сигнал для остановки с замедлением в режиме 1, активен нарастающий фронт
Б[9] //В режиме 1 стартовый сигнал для начала синхронизации чейза активен по переднему фронту
B[10] (монитор)//В режиме 1 этот бит равен 1 во время остановки замедления, остальные 0 B[11] (монитор)//В режиме 1 этот бит равен 0 во время остановки замедления и 1, когда законченный
B[12] (монитор)//В режиме 1 этот бит равен 1 во время синхронизации, остальные 0 B[13] (монитор)//В режиме 1 этот бит равен 0 во время синхронизации и 1, когда законченный
_______________________________________________________________________________
ПВ[0] //Установить время цикла (мс) поплавковый тип
ПВ[2] //Настройка молекул электронного механизма поплавковый тип
ПВ[4] // Установка знаменателя электронного редуктора поплавковый тип
ПВ[6] //Количество импульсов, пройденных шпинделем при компенсации поплавкового типа Заполните по мере необходимости
ПВ[8] //Количество компенсационных импульсов float type Заполните по мере необходимости
ДВ[10] //Входящая позиция шпинделя тип int
ПВ[12] //Установка виртуальной скорости шпинделя поплавковый тип
DW[14] (монитор)//Положение шпинделя Импульсы тип int
ДВ[16] (монитор)//Данная позиция тип int
FW[18] (монитор)//Теоретическая заданная скорость поплавковый тип
FW[20] (монитор)//Расчетная скорость шпинделя поплавковый тип
FW[22] (монитор)//Значение положения компенсации Начиная с 0 каждый раз поплавковый тип
ФВ[24] // установить КП поплавковый тип
ДВ[26] //Входящее фактическое положение оси тип int
ФВ[28] //Установить максимальную скорость компенсации поплавковый тип
FW[30] (монитор)//Ошибка реального времени поплавковый тип
FW[32] (монитор)//скорость компенсации в реальном времени поплавковый тип
ФВ[34] //Передает в реальном времени заданную скорость поплавковый тип
ФВ[36] //Тормозной путь для останова замедлением в режиме 1, где задано расстояние торможения от вала поплавковый тип
ФВ[38] //Расстояние, пройденное шпинделем при синхронном гонке в режиме 1 поплавковый тип
ПВ[40] //В режиме 1 расстояние, которое нужно пройти от оси во время синхронизации поплавковый тип
FW[42] //Малое значение V1, рассчитанное путем контроля второго состояния синхронизации чейза в режиме 1 поплавковый тип
FW[44] //Большое значение V1, рассчитанное путем контроля второго состояния синхронизации чейза в режиме 1 поплавковый тип
FW[46] //Мониторинг значений VO для синхронизации чейза в режиме 1
поплавковый тип
FW[48] //В режиме 1 отслеживать, в какой ветви обработки находится ускорение и торможение тип int
FW[50] //В режиме 1 контролируется положение шпинделя
поплавковый тип
FW[52] //В режиме 1 расстояние, которое нужно пройти от оси во время синхронизации поплавковый тип
DW[60] //Электронная генерация редуктора для заданной позиции
тип int
FW[62] //Заданная скорость, генерируемая электронным редуктором, т.е. 6034 без компенсации поплавковый тип
ФВ[70] //Установка компенсированного электронного типа молекул с плавающей запятой
FW[72] //Выводит только заданную скорость, генерируемую электронным редуктором D5502/D5504, в отличие от D5562.
D5562 — заданная скорость, генерируемая (D5502+D5570)/D5504. поплавковый тип
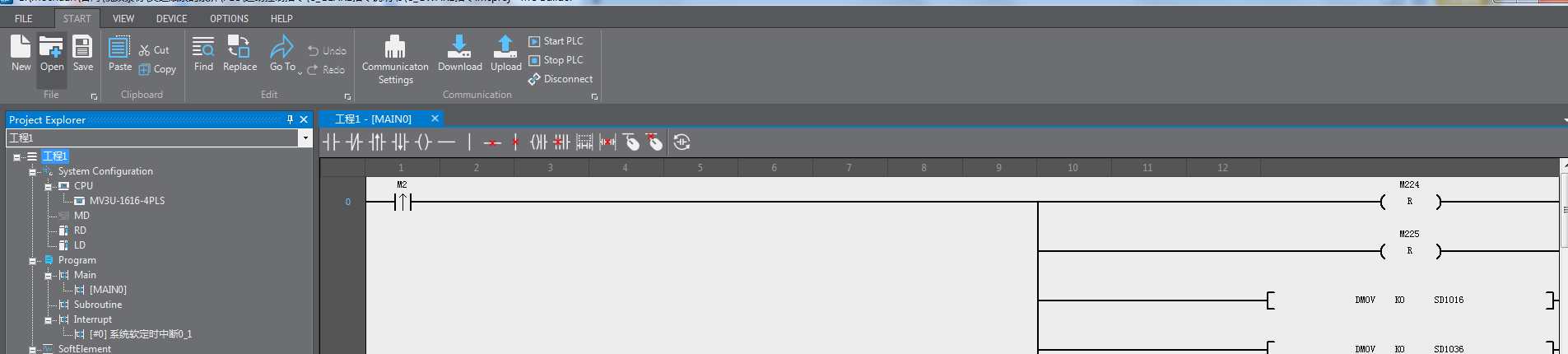
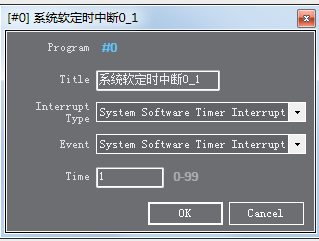
1. Эта инструкция должна находиться в прерывании программного компонента системы, а период выполнения инструкции должен быть таким же, как параметр во внешнем FW[0].
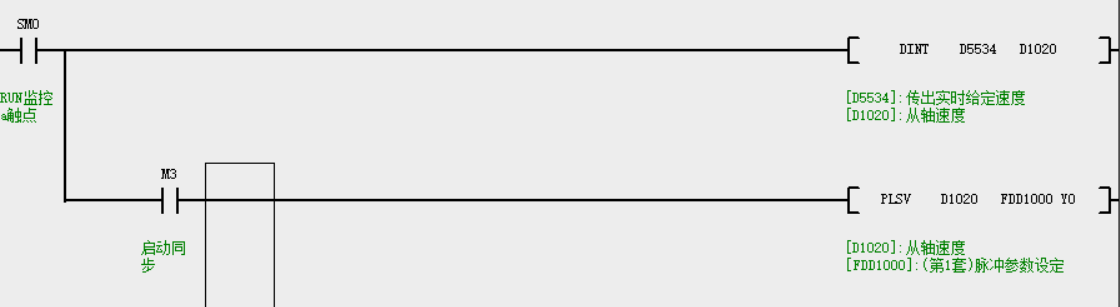
M3 может запустить эту команду
2. Параметры B[0], B[3] и B[7] необходимо установить при настройке битовых параметров.
Б[0] // Включение электронного редуктора Постоянно задано 1 для запуска всей функции, задано 0 для приостановки функции.
Б[3] //быть 1, чтобы включить виртуальный шпиндель 1 для запуска виртуальной оси, 0 для передачи фактического значения энкодера в DW[10]
Б[7] //Выбор режима 0 для режима без разгона/торможения, 1 для режима разгона/торможения электронного редуктора стоп-старт.
Второй, оставшийся B[1]: срабатывание B[1] во время выполнения инструкции можно компенсировать один раз. (Направление компенсации определяется параметрами в B[2])
Б[1] //Выполнение компенсации Скачки от 0 до 1 компенсируются один раз (если включен электронный редуктор)
БИ 2] //Направление компенсации 1 для прямого направления 0 для обратного
Когда режим в B[7] равен 0, команда не может запускать синхронизацию ускорения и остановку замедления.
Когда режим в B[7] равен 1, шпинделю необходимо запустить B[9] для ускоренного пуска и B[8] для останова с замедлением при остановке.
Б[8] //Стартовый сигнал для остановки с замедлением в режиме 1 (активен по переднему фронту)
Б[9] //В режиме 1 активируется стартовый сигнал синхронизации чейза (активен нарастающий фронт)
Все остальные биты являются параметрами контроля
Б[4] (монитор) // Бит флага выполнения компенсации
Б[5] (монитор)//Есть ли предупреждения
B[10] (монитор)//В режиме 1 этот бит равен 1 во время остановки с замедлением, в остальное время 0
B[11] (монитор)//В режиме 1 этот бит равен 0 во время остановки замедления и 1 по окончании
B[12] (монитор)//В режиме 1 этот бит равен 1 во время синхронизации, остальные 0
B[13] (монитор)//В режиме 1 этот бит равен 0 во время синхронизации и 1 по завершении.
3. Настройка параметров Word
ПВ[0] //Установить время цикла (мс) поплавковый тип
ПВ[2] //Настройка молекул электронного механизма поплавковый тип
ПВ[4] //Установка знаменателя электронного редуктора поплавковый тип
FW[0]Параметры в этом разделе должны быть такими же, как и в программном прерывании компонента.
Соотношение FW[2] и FW[4] между ведущей и ведомой осями устанавливается в соответствии с фактическими условиями
ПВ[6] //Количество импульсов, пройденных шпинделем во время компенсации float Тип заполнения по мере необходимости
ПВ[8] //Количество компенсационных импульсов Тип float заполнить по мере необходимости
FW[6] — это количество импульсов, которое должно быть принято ведущей осью во время компенсации, FW[8] — это количество импульсов, которое должно быть компенсировано ведомой осью.
(Количество импульсов, установленное в FW [8], должно быть скомпенсировано по оси в пределах параметров, установленных в FW [6])
ДВ[10] //Входящая позиция шпинделя тип int
ПВ[12] //Установка виртуальной скорости шпинделя поплавковый тип
ФВ[24] // установить КП поплавковый тип
ДВ[26] //Входящее фактическое положение оси тип int
ФВ[28] //Установить максимальную скорость компенсации поплавковый тип
DW [10] и FW [12] - это положение шпинделя и скорость шпинделя, которые необходимо ввести в режиме реального времени.
DW [26] — это положение ведомой оси, которое необходимо ввести в режиме реального времени (для обеспечения синхронизации шпинделя и ведомой оси).
FW[24] — отношение ускорения к замедлению
FW[28] устанавливает максимальную скорость компенсации (скорость компенсации, превышающая максимальную скорость компенсации, включает B[5] в команде)
ФВ[34] //Передает в реальном времени заданную скорость поплавковый тип
ФВ[36] //Тормозной путь от оси при остановке замедлением в режиме 1, плавающий тип
ФВ[38] //Расстояние, пройденное шпинделем во время чейза синхронизации в режиме 1 float
ПВ[40] //В режиме 1 расстояние, которое необходимо пройти от оси во время синхронизации, плавает
FW[34] — скорость ведомой оси, заданная командой (записанная в ведомую ось с помощью команды PLSV)
FW[36] — расстояние, необходимое для замедления от вала до 0 при остановке замедления.
FW[38] и FW[38] — это количество импульсов, которые должны быть получены ведущей и ведомой осями соответственно при синхронизации.
ФВ[70] //Настройка скомпенсированных молекул электронного механизма поплавковый тип
При необходимости передаточное отношение электронного редуктора также можно компенсировать FW [70] непосредственно в числителе электронного редуктора.