Mochuan MV-Serie plc GEAR1-Anweisungsbeschreibung
GANG1
C_GEAR1 Dn Mn
/**
B[0] //Aktivierung des elektronischen Getriebes Geben Sie kontinuierlich 1 ein, um die gesamte Funktion auszuführen, und geben Sie 0 ein, um die Funktion anzuhalten.
B[1] //Durchsetzung der Entschädigung 0-zu-1-Sprünge werden einmalig kompensiert (bei aktiviertem elektronischen Getriebe)
B[2] //Kompensationsrichtung 1 für vorwärts, 0 für rückwärts
B[3] //sein 1, um die virtuelle Spindel 1 zu aktivieren, um die virtuelle Achse zu starten, 0, um den tatsächlichen Encoderwert an DW[10] übergeben zu lassen
B[4] (Monitor) //Flag-Bit für die Kompensationsausführung
B[5] (Monitor)//hier eine Warnung
B[6] //0 zu 1 Sprung, gegebene Position klar 0.
B[7] //Modusauswahl 0 für keinen Beschleunigungs-/Verzögerungsmodus, 1 für Beschleunigung/Verzögerung mit elektronischem Getriebe, Stopp-Start
B[8] //Startsignal für Verzögerungsstopp im Modus 1, steigende Flanke aktiv
B[9] //Im Modus 1 ist das Startsignal zum Starten der Chase-Synchronisation bei der steigenden Flanke aktiv
B[10] (Überwachung)//Im Modus 1 ist dieses Bit während des Verzögerungsstopps 1, der Rest ist 0 B[11] (Überwachung)//Im Modus 1 ist dieses Bit während des Verzögerungsstopps 0 und 1, wenn fertig
B[12] (Monitor)//Im Modus 1 ist dieses Bit während der Synchronisierungsverfolgung 1, der Rest ist 0 B[13] (Überwachung)//Im Modus 1 ist dieses Bit während der Synchronisierungsverfolgung 0 und 1, wenn fertig
_____________________________________________________________________________________________
FW[0] //Zykluszeit einstellen (ms) Float-Typ
FW[2] //Aufbau elektronischer Zahnradmoleküle Float-Typ
FW[4] // Einstellen des Nenners des elektronischen Getriebes Float-Typ
FW[6] //Anzahl der von der Spindel während des Kompensations-Float-Typs zurückgelegten Impulse Füllen Sie es nach Bedarf aus
FW[8] //Anzahl der Kompensationsimpulse vom Float-Typ Füllen Sie es nach Bedarf aus
DW[10] //Eingehende Spindelposition int-Typ
FW[12] //Einstellen der virtuellen Spindelgeschwindigkeit Float-Typ
DW[14] (Überwachung)//Spindelpositionsimpulse int-Typ
DW[16] (Monitor)//Gegebene Position int-Typ
FW[18] (Monitor)//Theoretisch gegebene Geschwindigkeit Float-Typ
FW[20] (Monitor)//Berechnete Spindelgeschwindigkeit Float-Typ
FW[22] (Überwachung)//Kompensationspositionswert Jedes Mal beginnend bei 0 Float-Typ
FW[24] // KP einstellen Float-Typ
DW[26] //Eingehende Ist-Position von der Achse int-Typ
FW[28] //Maximale Kompensationsgeschwindigkeit einstellen Float-Typ
FW[30] (Monitor)//Echtzeitfehler Float-Typ
FW[32] (Überwachung)//Echtzeit-Kompensationsgeschwindigkeit Float-Typ
FW[34] //Überträgt eine in Echtzeit gegebene Geschwindigkeit Float-Typ
FW[36] //Anhalteweg für Verzögerungsstopp im Modus 1, in dem der Verzögerungsweg von der Welle eingestellt wird Float-Typ
FW[38] //Distanz, die die Spindel während der Synchronisationsverfolgung im Modus 1 verbraucht Float-Typ
FW[40] //Im Modus 1 die Entfernung, die während der Synchronisierungsverfolgung von der Achse zurückgelegt werden soll Float-Typ
FW[42] //Der kleine Wert von V1, berechnet durch Überwachung des zweiten Status der Chase-Synchronisierung in Modus 1 Float-Typ
FW[44] //Der große Wert von V1, berechnet durch Überwachung des zweiten Status der Chase-Synchronisierung in Modus 1 Float-Typ
FW[46] //Überwachung der VO-Werte für die Chase-Synchronisation in Modus 1
Float-Typ
FW[48] //Überwachen Sie im Modus 1, in welchem Verarbeitungszweig sich die Beschleunigung und Verzögerung befindet int-Typ
FW[50] //Im Modus 1 wird die Spindelposition überwacht
Float-Typ
FW[52] //Im Modus 1 die Distanz, die während der Synchronisierungsverfolgung von der Achse zurückgelegt werden soll Float-Typ
DW[60] //Elektronische Getriebegenerierung für eine bestimmte Position
int-Typ
FW[62] //Die vom elektronischen Getriebe erzeugte vorgegebene Geschwindigkeit, d. h. 6034 ohne Kompensation Float-Typ
FW[70] //Einrichtung kompensierter elektronischer Zahnradmoleküle vom Float-Typ
FW[72] //Gibt nur die angegebene Geschwindigkeit aus, die vom elektronischen Getriebe D5502/D5504 im Gegensatz zum D5562 erzeugt wird.
D5562 ist die gegebene Geschwindigkeit, die durch (D5502+D5570)/D5504 erzeugt wird Float-Typ
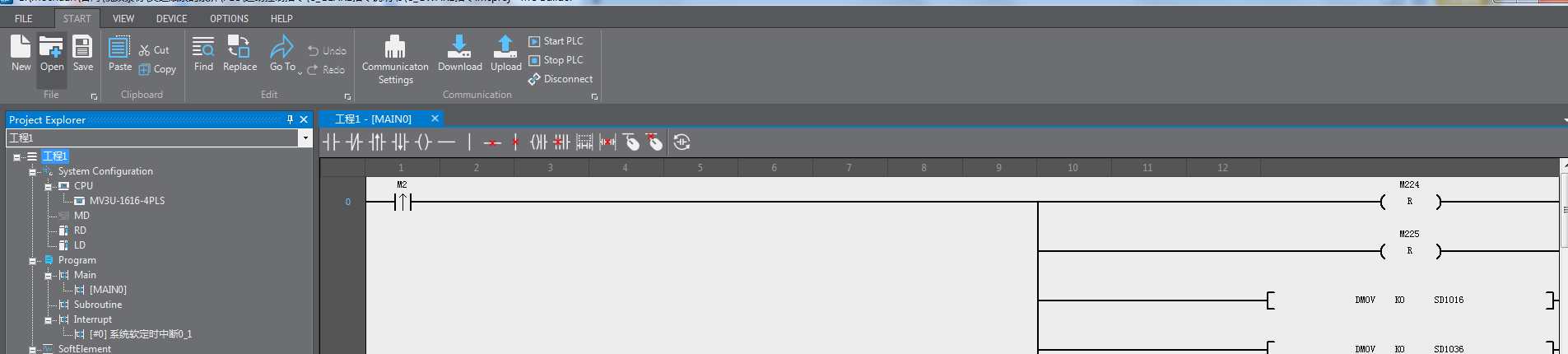
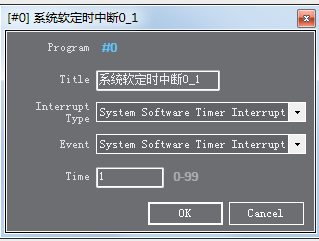
1. Dieser Befehl muss sich im System-Softkomponenten-Interrupt befinden und die Ausführungsdauer des Befehls muss mit dem Parameter in der externen FW[0] übereinstimmen.
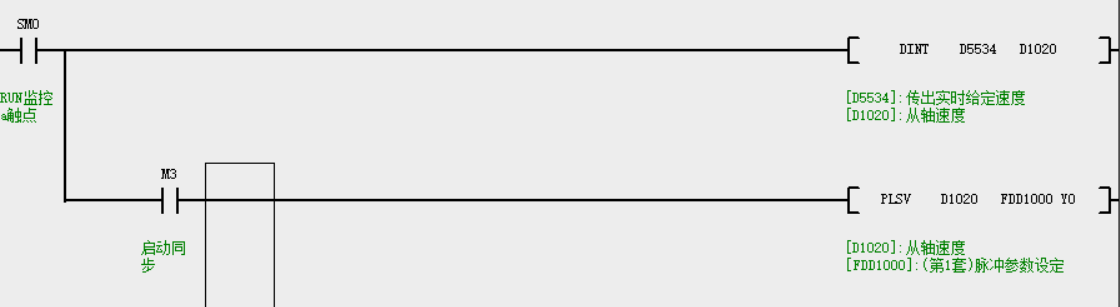
M3 kann diesen Befehl starten
2. Beim Setzen der Bitparameter müssen die Parameter B[0], B[3] und B[7] eingestellt werden
B[0] //Aktivierung des elektronischen Getriebes. Kontinuierlich 1 gegeben, um die gesamte Funktion auszuführen, 0 gegeben, um die Funktion auszusetzen.
B[3] //sein 1 um die virtuelle Spindel zu aktivieren 1 um die virtuelle Achse zu starten, 0 um den tatsächlichen Encoderwert an DW[10] zu übergeben
B[7] //Modusauswahl 0 für keinen Beschleunigungs-/Verzögerungsmodus, 1 für Beschleunigungs-/Verzögerungs-Stopp-Start-Modus mit elektronischem Getriebe.
Das zweite, verbleibende B[1]: Das Auslösen von B[1] während des Befehlslaufs kann einmalig kompensiert werden. (Die Kompensationsrichtung wird durch die Parameter in B[2] bestimmt)
B[1] //Ausführung der Kompensation 0-1-Sprünge werden einmalig kompensiert (sofern elektronisches Getriebe aktiviert ist)
B[2] //Kompensationsrichtung 1 für vorwärts, 0 für rückwärts
Wenn der Modus in B[7] 0 ist, kann der Befehl keine Beschleunigungssynchronisierung und keinen Verzögerungsstopp auslösen.
Wenn der Modus in B[7] 1 ist, muss die Spindel beim Stoppen B[9] für beschleunigten Start und B[8] für verlangsamten Stopp auslösen.
B[8] //Startsignal für Verzögerungsstopp im Modus 1, (aktiv bei steigender Flanke)
B[9] //Im Modus 1 ist das Startsignal für die Chase-Synchronisation aktiviert, (steigende Flanke aktiv)
Alle übrigen Bits sind Überwachungsparameter
B[4] (Monitor) //Flag-Bit für die Kompensationsausführung
B[5] (Monitor)//Gibt es Warnungen?
B[10] (Überwachung)//Im Modus 1 ist dieses Bit während des Verzögerungsstopps 1, der Rest ist 0
B[11] (Überwachung)//Im Modus 1 ist dieses Bit 0 während des Verzögerungsstopps und 1, wenn es beendet ist
B[12] (Monitor)//Im Modus 1 ist dieses Bit während der Synchronisationsverfolgung 1, der Rest ist 0
B[13] (Monitor)//Im Modus 1 ist dieses Bit während der Synchronisationsjagd 0 und nach Abschluss 1.
3.Word-Parametereinstellung
FW[0] //Zykluszeit einstellen (ms) Float-Typ
FW[2] //Aufbau elektronischer Zahnradmoleküle Float-Typ
FW[4] //Einstellung des Nenners des elektronischen Getriebes Float-Typ
FW[0]Die Parameter in diesem Abschnitt müssen mit denen übereinstimmen, die im Soft-Component-Interrupt festgelegt sind
FW[2]- und FW[4]-Verhältnis zwischen Master- und Slave-Achsen entsprechend den tatsächlichen Bedingungen eingestellt
FW[6] //Anzahl der von der Spindel während der Kompensation zurückgelegten Impulse float Geben Sie den Typ „Füllung“ nach Bedarf ein
FW[8] //Anzahl der Kompensationsimpulse float Typ nach Bedarf füllen
FW[6] ist die Anzahl der von der Master-Achse während der Kompensation aufzunehmenden Impulse, FW[8] ist die Anzahl der von der Slave-Achse zu kompensierenden Impulse
(Die in FW [8] eingestellte Anzahl der Impulse muss von der Achse aus innerhalb der in FW [6] eingestellten Parameter kompensiert werden.)
DW[10] //Eingehende Spindelposition int-Typ
FW[12] //Einstellen der virtuellen Spindelgeschwindigkeit Float-Typ
FW[24] // KP einstellen Float-Typ
DW[26] //Eingehende Ist-Position von der Achse int-Typ
FW[28] //Maximale Kompensationsgeschwindigkeit einstellen Float-Typ
DW [10] und FW [12] sind die in Echtzeit einzugebende Spindelposition und Spindeldrehzahl
DW [26] ist die Position der Slave-Achse, die in Echtzeit eingegeben werden muss (um die Synchronisierung von Spindel und Slave-Achse sicherzustellen).
FW[24] ist das Verhältnis von Beschleunigung zu Verzögerung
FW[28] legt die maximale Kompensationsgeschwindigkeit fest (eine Kompensationsgeschwindigkeit, die größer als die maximale Kompensationsgeschwindigkeit ist, setzt B[5] im Befehl auf „Ein“).
FW[34] //Überträgt eine in Echtzeit gegebene Geschwindigkeit Float-Typ
FW[36] //Stoppabstand von der Achse bei Verzögerungsstopp im Modus 1, Float-Typ
FW[38] //Distanz, die die Spindel während der Synchronisierungsverfolgung in Modus 1 Float verbraucht
FW[40] //Im Modus 1 die Distanz, die von der Achse während des Synchronisations-Chase-Floats zurückgelegt werden soll
FW[34] ist die durch den Befehl vorgegebene Geschwindigkeit der Slave-Achse (über den PLSV-Befehl in die Slave-Achse geschrieben).
FW[36] ist die Entfernung, die erforderlich ist, um bei Verzögerungsstopp von der Welle auf 0 abzubremsen
FW[38] und FW[38] sind die Anzahl der Impulse, die von der Master- bzw. Slave-Achse bei der Verfolgung der Synchronisierung benötigt werden
FW[70] //Aufbau kompensierter elektronischer Zahnradmoleküle Float-Typ
Bei Bedarf kann die elektronische Getriebeübersetzung FW [70] auch direkt mit dem elektronischen Getriebeübersetzungszähler kompensiert werden