Descrição da instrução Mochuan MV série plc GEAR1
GEAR1
C_GEAR1 Dn Mn
/**
B[0] // Habilitando equipamento eletrônico Dê continuamente 1 para executar toda a função, dê 0 para pausar a função.
B[1] //Execução da compensação Os saltos de 0 a 1 são compensados uma vez (com engrenagem eletrônica habilitada)
B[2] //Direção de compensação 1 para frente 0 para reverso
B[3] //ser 1 para habilitar o fuso virtual 1 para iniciar o eixo virtual, 0 para ter o valor real do encoder passado para DW[10]
B[4] (Monitor) //Bit sinalizador de execução de compensação
B[5] (monitorar)//aqui um aviso
B[6] // salto de 0 para 1, dada posição limpa 0.
B[7] //Seleção de modo 0 para nenhum modo de aceleração/desaceleração, 1 para aceleração/desaceleração eletrônica parar início
B[8] //Sinal de partida para parada de desaceleração no modo 1, flanco ascendente ativo
B[9] //No modo 1, o sinal de início para iniciar a sincronização de perseguição está ativo na borda de subida
B[10] (monitor)//No modo 1, este bit é 1 durante a parada por desaceleração, o resto é 0 B[11] (monitor)//No modo 1, este bit é 0 durante a parada por desaceleração e 1 quando finalizado
B[12] (monitor)//No modo 1, este bit é 1 durante a sincronização, o resto é 0 B[13] (monitor)//No modo 1, este bit é 0 durante a sincronização e 1 quando finalizado
________________________________________________________________________________
FW[0] //Definir tempo de ciclo (ms) tipo flutuante
FW[2] //Configurando moléculas de engrenagens eletrônicas tipo flutuante
FW[4] // Configurando o denominador eletrônico da engrenagem tipo flutuante
FW[6] //Número de pulsos percorridos pelo fuso durante o tipo float de compensação Preencha conforme necessário
FW[8] //Número de pulsos de compensação tipo float Preencha conforme necessário
DW[10] //Posição do fuso de entrada tipo int
FW[12] //Configurando a velocidade do fuso virtual tipo flutuante
DW[14] (monitor)//Posição do fuso Pulsos tipo int
DW[16] (monitor)//Posição dada tipo int
FW[18] (monitor)//Velocidade teórica dada tipo flutuante
FW[20] (monitor)//Velocidade do fuso calculada tipo flutuante
FW[22] (monitor)//Valor da posição de compensação Começando de 0 a cada vez tipo flutuante
FW[24] // definir KP tipo flutuante
DW[26] //Real de entrada da posição do eixo tipo int
FW[28] //Define a velocidade máxima de compensação tipo flutuante
FW[30] (monitor)//Erro em tempo real tipo flutuante
FW[32] (monitor)//Velocidade de compensação em tempo real tipo flutuante
FW[34] //Transmite uma velocidade dada em tempo real tipo flutuante
FW[36] //Distância de parada para parada de desaceleração no modo 1, onde a distância de desaceleração do eixo é definida tipo flutuante
FW[38] //Distância consumida pelo fuso durante a busca de sincronização no modo 1 tipo flutuante
FW[40] //No modo 1, a distância a ser percorrida do eixo durante o rastreamento de sincronização tipo flutuante
FW[42] //O pequeno valor de V1 calculado monitorando o segundo estado da sincronização de perseguição no modo 1 tipo flutuante
FW[44] //O grande valor de V1 calculado monitorando o segundo estado da sincronização de perseguição no modo 1 tipo flutuante
FW[46] //Monitoramento dos valores de VO para sincronização de chase no modo 1
tipo flutuante
FW[48] //No modo 1, monitora em qual ramo de processamento a aceleração e a desaceleração estão tipo int
FW[50] //No modo 1, a posição do fuso é monitorada
tipo flutuante
FW[52] //No modo 1, a distância a ser percorrida do eixo durante o rastreamento de sincronização tipo flutuante
DW[60] //Geração de engrenagem eletrônica para uma determinada posição
tipo int
FW[62] //A velocidade dada gerada pela engrenagem eletrônica, ou seja, 6034 sem compensação tipo flutuante
FW[70] //Configurando o tipo flutuante de moléculas de engrenagens eletrônicas compensadas
FW[72] //Envia apenas a velocidade dada gerada pela engrenagem eletrônica D5502/D5504, ao contrário do D5562.
D5562 é a velocidade dada gerada por (D5502+D5570)/D5504 tipo flutuante
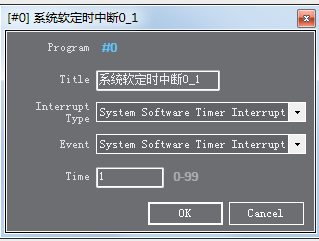
1. Esta instrução precisa estar na interrupção do componente programável do sistema e o período de execução da instrução precisa ser o mesmo que o parâmetro no FW[0] externo.
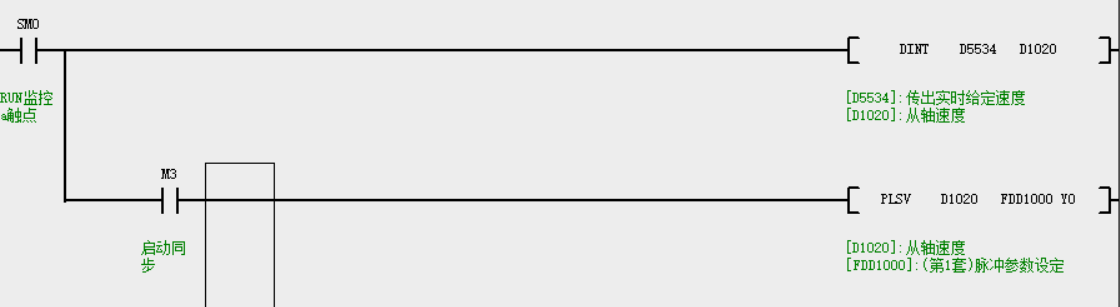
M3 pode iniciar este comando
2. Os parâmetros B[0], B[3] e B[7] precisam ser definidos ao definir os parâmetros de bit
B[0] //Habilitando engrenagem eletrônica Continuamente dado 1 para executar toda a função, dado 0 para suspender a função.
B[3] //ser 1 para habilitar o fuso virtual 1 para iniciar o eixo virtual, 0 para passar o valor real do encoder para DW[10]
B[7] //Seleção de modo 0 para nenhum modo de aceleração/desaceleração, 1 para modo de aceleração/desaceleração de marcha eletrônica.
O segundo B[1] restante: o disparo de B[1] durante a execução da instrução pode ser compensado uma vez. (A direção da compensação é determinada pelos parâmetros em B[2])
B[1] //Execução da compensação Os saltos de 0 a 1 são compensados uma vez (se a engrenagem eletrônica estiver habilitada)
B[2] //Direção de compensação 1 para frente 0 para reverso
Quando o modo em B[7] é 0, o comando não pode acionar a sincronização da aceleração e a parada da desaceleração.
Quando o modo em B[7] é 1, o fuso precisa acionar B[9] para partida acelerada e B[8] para parada desacelerada ao parar.
B[8] //Sinal de partida para parada de desaceleração no modo 1, (ativo na borda de subida)
B[9] //No modo 1, o sinal de início para sincronização de perseguição é ativado, (borda de subida ativa)
Todos os bits restantes são parâmetros de monitoramento
B[4] (monitor) //Bit sinalizador de execução de compensação
B[5] (monitorizar)//Existem avisos
B[10] (monitor)//No modo 1, este bit é 1 durante a parada de desaceleração, o resto é 0
B[11] (monitor)//No modo 1, este bit é 0 durante a parada de desaceleração e 1 quando termina
B[12] (monitor)//No modo 1, este bit é 1 durante a busca de sincronização, o resto é 0
B[13] (monitor)//No modo 1, este bit é 0 durante o chase de sincronização e 1 quando finalizado.
3.Configuração do parâmetro de palavra
FW[0] //Definir tempo de ciclo (ms) tipo flutuante
FW[2] //Configurando moléculas de engrenagens eletrônicas tipo flutuante
FW[4] //Configurando o denominador eletrônico da engrenagem tipo flutuante
FW[0]Os parâmetros nesta seção devem ser os mesmos definidos na interrupção do componente suave
Relação FW[2] e FW[4] entre os eixos mestre e escravo definidos de acordo com as condições reais
FW[6] //Número de pulsos percorridos pelo fuso durante o flutuador de compensação Digite o preenchimento conforme necessário
FW[8] //Número de pulsos de compensação float Tipo preencha conforme necessário
FW[6] é o número de pulsos a serem tomados pelo eixo mestre durante a compensação, FW[8] é o número de pulsos a serem compensados pelo eixo escravo
(O número de pulsos definido em FW [8] deve ser compensado do eixo dentro dos parâmetros definidos em FW [6])
DW[10] //Posição do fuso de entrada tipo int
FW[12] //Configurando a velocidade do fuso virtual tipo flutuante
FW[24] // definir KP tipo flutuante
DW[26] //Real de entrada da posição do eixo tipo int
FW[28] //Define a velocidade máxima de compensação tipo flutuante
DW [10] e FW [12] são a posição do fuso e a velocidade do fuso a serem inseridas em tempo real
DW [26] é a posição do eixo escravo a ser inserida em tempo real (para garantir a sincronização do fuso e do eixo escravo)
FW[24] é a razão entre aceleração e desaceleração
FW[28] define a velocidade de compensação máxima (uma velocidade de compensação maior que a velocidade de compensação máxima definirá B[5] no comando para ligado)
FW[34] //Transmite uma velocidade dada em tempo real tipo flutuante
FW[36] //Distância de parada do eixo na parada de desaceleração no modo 1, tipo float
FW[38] //Distância consumida pelo spindle durante o tracking de sincronização no modo 1 float
FW[40] //No modo 1, a distância a ser percorrida do eixo durante a sincronização Chase float
FW[34] é a velocidade do eixo escravo dada pelo comando (escrito no eixo escravo por meio do comando PLSV)
FW[36] é a distância necessária para desacelerar do eixo até 0 na parada de desaceleração
FW[38] e FW[38] são o número de pulsos a serem tomados pelos eixos mestre e escravo, respectivamente, ao perseguir a sincronização
FW[70] //Configurando moléculas de engrenagens eletrônicas compensadas tipo flutuante
Se necessário, a relação de transmissão eletrônica também pode ser compensada FW [70] diretamente no numerador da relação de transmissão eletrônica