คำอธิบายคำสั่ง Mochuan MV series plc GEAR1
เกียร์1
C_GEAR1 ด ล้าน
/**
ข[0] // เปิดใช้งานเกียร์อิเล็กทรอนิกส์ ต่อเนื่องให้ 1 เพื่อเรียกใช้ฟังก์ชันทั้งหมด ให้ 0 เพื่อหยุดฟังก์ชันชั่วคราว
ข[1] //บังคับชดใช้ ชดเชยการกระโดด 0 ถึง 1 ครั้ง (เมื่อเปิดใช้งานเกียร์อิเล็กทรอนิกส์)
ข[2] // ทิศทางการชดเชย 1 สำหรับไปข้างหน้า 0 สำหรับย้อนกลับ
ข[3] // เป็น 1 เพื่อเปิดใช้งานสปินเดิลเสมือน 1 เพื่อเริ่มแกนเสมือน 0 เพื่อส่งค่าเข้ารหัสจริงไปยัง DW[10]
ข[4] (มอนิเตอร์) // บิตค่าสถานะการดำเนินการชดเชย
ข[5] (มอนิเตอร์)//นี่คือคำเตือน
ข[6] // กระโดด 0 ถึง 1 ตำแหน่งที่กำหนดล้าง 0
ข[7] // การเลือกโหมด 0 สำหรับโหมดไม่เร่งความเร็ว/ลดความเร็ว, 1 สำหรับเริ่มหยุดการเร่ง/ลดความเร็วด้วยเกียร์อิเล็กทรอนิกส์
ข[8] // สัญญาณเริ่มหยุดการชะลอความเร็วในโหมด 1 ขอบที่เพิ่มขึ้นทำงานอยู่
ข[9] // ในโหมด 1 สัญญาณเริ่มต้นเพื่อเริ่มการซิงโครไนซ์การไล่ล่าจะทำงานที่ขอบที่เพิ่มขึ้น
B[10] (จอภาพ)//ในโหมด 1 บิตนี้คือ 1 ระหว่างการหยุดการชะลอตัว ส่วนที่เหลือคือ 0 B[11] (จอภาพ)//ในโหมด 1 บิตนี้คือ 0 ระหว่างการหยุดการชะลอตัว และ 1 เมื่อ ที่เสร็จเรียบร้อย
B[12] (มอนิเตอร์)//ในโหมด 1 บิตนี้คือ 1 ระหว่างการซิงโครไนซ์เชส ส่วนที่เหลือคือ 0 B[13] (มอนิเตอร์)//ในโหมด 1 บิตนี้คือ 0 ระหว่างการซิงโครไนซ์เชส และ 1 เมื่อ ที่เสร็จเรียบร้อย
_______________________________________________________________________________
เอฟดับบลิว[0] // ตั้งรอบเวลา (มิลลิวินาที) ประเภทลอย
เอฟดับเบิลยู[2] // การตั้งค่าโมเลกุลเกียร์อิเล็กทรอนิกส์ ประเภทลอย
เอฟดับเบิลยู[4] // การตั้งค่าตัวหารเกียร์อิเล็กทรอนิกส์ ประเภทลอย
เอฟดับเบิลยู[6] // จำนวนพัลส์ที่เดินทางโดยแกนหมุนระหว่างประเภททุ่นชดเชย กรอกตามต้องการ
เอฟดับเบิลยู[8] // จำนวนพัลส์ชดเชยประเภทลอย กรอกตามต้องการ
DW[10] // ตำแหน่งสปินเดิลขาเข้า ประเภท int
เอฟดับบลิว[12] // การตั้งค่าความเร็วแกนเสมือน ประเภทลอย
DW[14] (มอนิเตอร์)//ตำแหน่งแกนหมุน พัลส์ ประเภท int
ดีดับบลิว[16] (มอนิเตอร์)//ตำแหน่งที่กำหนด ประเภท int
FW[18] (มอนิเตอร์)//ความเร็วที่กำหนดตามทฤษฎี ประเภทลอย
FW[20] (มอนิเตอร์)//ความเร็วแกนที่คำนวณ ประเภทลอย
FW[22] (มอนิเตอร์)//ค่าตำแหน่งการชดเชย เริ่มจาก 0 ทุกครั้ง ประเภทลอย
เอฟดับเบิลยู[24] // ตั้ง กพ ประเภทลอย
DW[26] // รับจริงจากตำแหน่งแกน ประเภท int
เอฟดับเบิลยู[28] // ตั้งค่าความเร็วชดเชยสูงสุด ประเภทลอย
FW[30] (มอนิเตอร์)//ข้อผิดพลาดแบบเรียลไทม์ ประเภทลอย
FW[32] (จอภาพ)//ความเร็วชดเชยตามเวลาจริง ประเภทลอย
เอฟดับบลิว[34] // ส่งตามเวลาจริงตามความเร็วที่กำหนด ประเภทลอย
เอฟดับเบิลยู[36] //ระยะหยุดสำหรับการชะลอการหยุดในโหมด 1 ซึ่งตั้งระยะการชะลอความเร็วจากเพลา ประเภทลอย
เอฟดับเบิลยู[38] // ระยะทางที่แกนหมุนใช้ระหว่างการไล่ตามการซิงโครไนซ์ในโหมด 1 ประเภทลอย
เอฟดับเบิลยู[40] //ในโหมด 1 ระยะทางที่จะเดินทางจากแกนระหว่างการไล่ตามการซิงโครไนซ์ ประเภทลอย
FW[42] // ค่าเล็กน้อยของ V1 คำนวณโดยการตรวจสอบสถานะที่สองของการซิงโครไนซ์การไล่ล่าในโหมด 1 ประเภทลอย
FW[44] // ค่ามากของ V1 คำนวณโดยการตรวจสอบสถานะที่สองของการซิงโครไนซ์การไล่ล่าในโหมด 1 ประเภทลอย
FW[46] // การตรวจสอบค่า VO สำหรับการซิงโครไนซ์การไล่ล่าในโหมด 1
ประเภทลอย
FW[48] // ในโหมด 1 ตรวจสอบสาขาการประมวลผลของการเร่งความเร็วและการชะลอตัวอยู่ใน ประเภท int
FW[50] //ในโหมด 1 ตำแหน่งแกนหมุนจะถูกตรวจสอบ
ประเภทลอย
FW[52] //ในโหมด 1 ระยะทางที่จะเดินทางจากแกนระหว่างการไล่ตามการซิงโครไนซ์ ประเภทลอย
DW[60] // การสร้างเฟืองอิเล็กทรอนิกส์สำหรับตำแหน่งที่กำหนด
ประเภท int
FW[62] // ความเร็วที่กำหนดซึ่งสร้างโดยเกียร์อิเล็กทรอนิกส์ เช่น 6034 โดยไม่มีการชดเชย ประเภทลอย
เอฟดับบลิว[70] // การตั้งค่าโมเลกุลเกียร์อิเล็กทรอนิกส์แบบลอยตัวที่ได้รับการชดเชย
FW[72] // ส่งออกเฉพาะความเร็วที่กำหนดซึ่งสร้างโดยเกียร์อิเล็กทรอนิกส์ D5502/D5504 ซึ่งตรงข้ามกับ D5562
D5562 คือความเร็วที่กำหนดซึ่งสร้างโดย (D5502+D5570)/D5504 ประเภทลอย
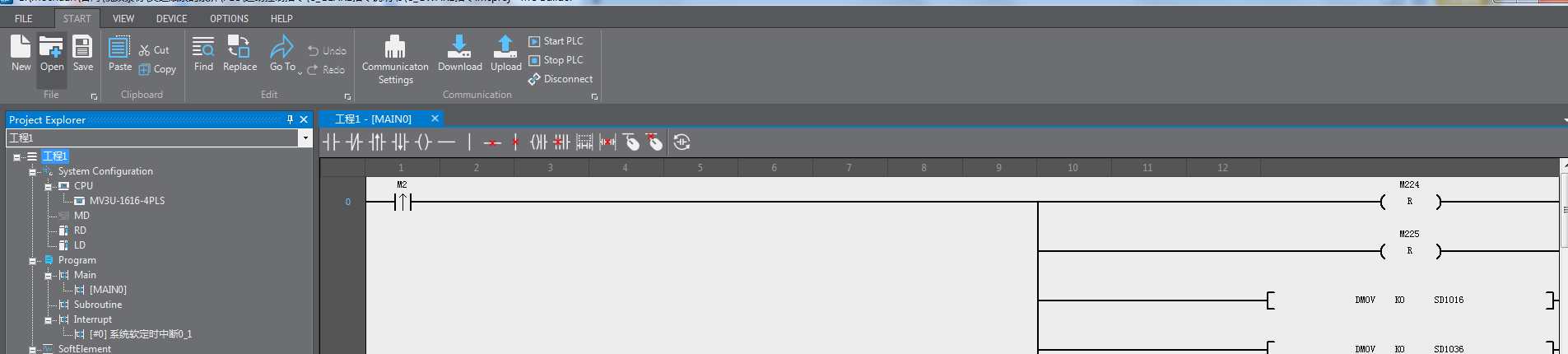
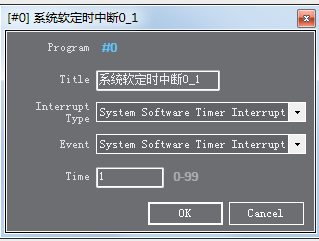
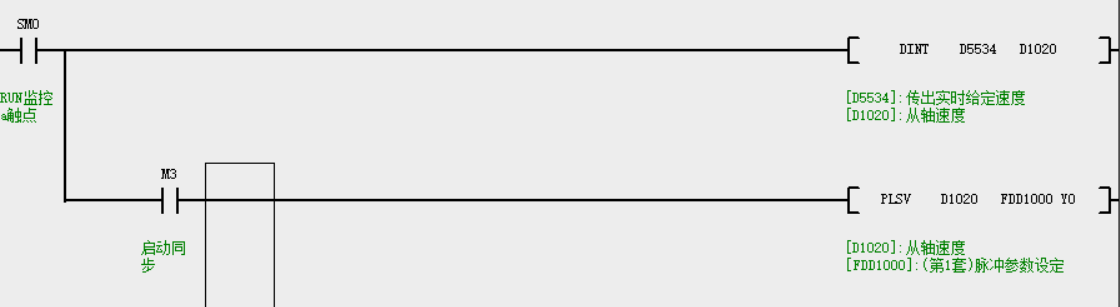
1. คำสั่งนี้ต้องอยู่ในการขัดจังหวะคอมโพเนนต์แบบอ่อนของระบบ และระยะเวลาการดำเนินการคำสั่งจะต้องเหมือนกับพารามิเตอร์ใน FW ภายนอก[0]
M3 สามารถเริ่มคำสั่งนี้ได้
2. ต้องตั้งค่าพารามิเตอร์ B[0], B[3] และ B[7] เมื่อตั้งค่าพารามิเตอร์บิต
ข[0] // เปิดใช้เกียร์อิเล็กทรอนิกส์อย่างต่อเนื่อง กำหนด 1 เพื่อเรียกใช้ฟังก์ชันทั้งหมด ให้ 0 เพื่อระงับฟังก์ชัน
ข[3] // เป็น 1 เพื่อเปิดใช้งานแกนเสมือน 1 เพื่อเริ่มแกนเสมือน 0 เพื่อส่งค่าเข้ารหัสจริงไปยัง DW[10]
ข[7] // การเลือกโหมด 0 สำหรับโหมดไม่เร่งความเร็ว/ลดความเร็ว, 1 สำหรับโหมดหยุด-เริ่มเร่ง/ลดความเร็วเกียร์อิเล็กทรอนิกส์
วินาทีที่เหลือ B[1]: การเรียกใช้ B[1] ในระหว่างการเรียกใช้คำสั่งสามารถชดเชยได้หนึ่งครั้ง (ทิศทางของการชดเชยถูกกำหนดโดยพารามิเตอร์ใน B[2])
ข[1] //การดำเนินการชดเชยการกระโดด 0 ถึง 1 จะได้รับการชดเชยหนึ่งครั้ง (หากเปิดใช้เกียร์อิเล็กทรอนิกส์)
ข[2] // ทิศทางการชดเชย 1 สำหรับไปข้างหน้า 0 สำหรับย้อนกลับ
เมื่อโหมดใน B[7] เป็น 0 คำสั่งจะไม่สามารถเรียกใช้การซิงโครไนซ์การเร่งความเร็วและการหยุดการชะลอความเร็วได้
เมื่อโหมดใน B[7] เป็น 1 สปินเดิลจะต้องสั่งงาน B[9] เพื่อเร่งความเร็วและ B[8] เพื่อหยุดโดยชะลอความเร็วเมื่อหยุด
ข[8] // สัญญาณเริ่มหยุดการชะลอตัวในโหมด 1 (ใช้งานบนขอบที่เพิ่มขึ้น)
ข[9] // ในโหมด 1 สัญญาณเริ่มต้นสำหรับการซิงโครไนซ์การไล่ล่าถูกเปิดใช้งาน (เปิดใช้งานขอบที่เพิ่มขึ้น)
บิตที่เหลือทั้งหมดเป็นพารามิเตอร์การตรวจสอบ
ข[4] (มอนิเตอร์) // บิตค่าสถานะการดำเนินการชดเชย
ข[5] (มอนิเตอร์)//มีคำเตือนไหม
B[10] (มอนิเตอร์)//ในโหมด 1 บิตนี้คือ 1 ระหว่างการหยุดการชะลอความเร็ว ส่วนที่เหลือคือ 0
B[11] (มอนิเตอร์)//ในโหมด 1 บิตนี้คือ 0 ระหว่างหยุดการชะลอความเร็วและ 1 เมื่อเสร็จสิ้น
B[12] (มอนิเตอร์)//ในโหมด 1 บิตนี้คือ 1 ระหว่างการไล่ตามการซิงโครไนซ์ ส่วนที่เหลือคือ 0
B[13] (มอนิเตอร์)//ในโหมด 1 บิตนี้คือ 0 ในระหว่างการไล่ตามการซิงโครไนซ์และ 1 เมื่อเสร็จสิ้น
3. การตั้งค่าพารามิเตอร์ของ Word
เอฟดับบลิว[0] // ตั้งรอบเวลา (มิลลิวินาที) ประเภทลอย
เอฟดับเบิลยู[2] // การตั้งค่าโมเลกุลเกียร์อิเล็กทรอนิกส์ ประเภทลอย
เอฟดับเบิลยู[4] // การตั้งค่าตัวส่วนเกียร์อิเล็กทรอนิกส์ ประเภทลอย
FW[0]พารามิเตอร์ในส่วนนี้ต้องเหมือนกับพารามิเตอร์ที่ตั้งค่าในการขัดจังหวะของคอมโพเนนต์แบบอ่อน
อัตราส่วน FW[2] และ FW[4] ระหว่างแกนหลักและแกนรองที่กำหนดตามเงื่อนไขจริง
เอฟดับเบิลยู[6] // จำนวนพัลส์ที่เดินทางโดยแกนหมุนระหว่างทุ่นชดเชย ชนิดเติมตามต้องการ
เอฟดับเบิลยู[8] // จำนวนพัลส์ชดเชยลอยประเภท กรอกตามต้องการ
FW[6] คือจำนวนของพัลส์ที่แกนหลักรับระหว่างการชดเชย FW[8] คือจำนวนของพัลส์ที่แกนรองจะชดเชย
(ต้องชดเชยจำนวนพัลส์ที่ตั้งค่าใน FW [8] จากแกนภายในพารามิเตอร์ที่ตั้งค่าใน FW [6])
DW[10] // ตำแหน่งสปินเดิลขาเข้า ประเภท int
เอฟดับบลิว[12] // การตั้งค่าความเร็วแกนเสมือน ประเภทลอย
เอฟดับเบิลยู[24] // ตั้ง กพ ประเภทลอย
DW[26] // รับจริงจากตำแหน่งแกน ประเภท int
เอฟดับเบิลยู[28] // ตั้งค่าความเร็วชดเชยสูงสุด ประเภทลอย
DW [10] และ FW [12] คือตำแหน่งสปินเดิลและความเร็วสปินเดิลที่ต้องป้อนตามเวลาจริง
DW [26] คือตำแหน่งแกนรองที่ต้องป้อนแบบเรียลไทม์ (เพื่อให้แน่ใจว่าแกนหมุนและแกนรองตรงกัน)
FW[24] คืออัตราส่วนของการเร่งความเร็วต่อการชะลอตัว
FW[28] ตั้งค่าความเร็วการชดเชยสูงสุด (ความเร็วการชดเชยที่มากกว่าความเร็วการชดเชยสูงสุดจะตั้งค่า B[5] ในคำสั่งเป็นเปิด)
เอฟดับบลิว[34] // ส่งตามเวลาจริงตามความเร็วที่กำหนด ประเภทลอย
เอฟดับเบิลยู[36] // ระยะหยุดจากแกนที่จุดลดความเร็วในโหมด 1 แบบลอย
เอฟดับเบิลยู[38] // ระยะทางที่สปินเดิลใช้ระหว่างการซิงโครไนซ์เชสในโหมด 1 โฟลต
เอฟดับเบิลยู[40] // ในโหมด 1 ระยะทางที่จะเดินทางจากแกนระหว่างการไล่ตามการซิงโครไนซ์ลอย
FW[34] คือความเร็วแกนรองที่กำหนดโดยคำสั่ง (เขียนลงในแกนรองโดยใช้คำสั่ง PLSV)
FW[36] คือระยะทางที่ต้องใช้ในการชะลอความเร็วจากเพลาถึง 0 เมื่อหยุดการชะลอความเร็ว
FW[38] และ FW[38] คือจำนวนพัลส์ที่แกนหลักและแกนรองใช้ตามลำดับเมื่อไล่ตามการซิงโครไนซ์
เอฟดับบลิว[70] // การตั้งค่าโมเลกุลเกียร์อิเล็กทรอนิกส์ที่ได้รับการชดเชย ประเภทลอย
หากจำเป็น อัตราทดเกียร์อิเล็กทรอนิกส์สามารถชดเชย FW [70] โดยตรงกับตัวเลขอัตราทดเกียร์อิเล็กทรอนิกส์