Mochuan MV serie plc GEAR1 descrizione delle istruzioni
INGRANAGGIO1
C_INGRANAGGIO1 Dn Mn
/**
B[0] //Abilitazione cambio elettronico Dare continuamente 1 per eseguire l'intera funzione, dare 0 per mettere in pausa la funzione.
B[1] //Esecuzione del risarcimento I salti da 0 a 1 vengono compensati una volta (con cambio elettronico abilitato)
B[2] //Direzione di compensazione 1 per avanti 0 per retromarcia
B[3] //essere 1 per abilitare il mandrino virtuale 1 per avviare l'asse virtuale, 0 per far passare il valore effettivo dell'encoder a DW[10]
B[4] (Monitor) //Bit del flag di esecuzione della compensazione
B[5] (monitor)//qui un avvertimento
B[6] // Salto da 0 a 1, data la posizione libera 0.
B[7] //Selezione modalità 0 per nessuna modalità di accelerazione/decelerazione, 1 per accelerazione/decelerazione del cambio elettronico stop start
B[8] //Segnale di avvio per arresto decelerazione in modalità 1, fronte di salita attivo
B[9] //Nella modalità 1, il segnale di avvio per avviare la sincronizzazione della sequenza è attivo sul fronte di salita
B[10] (monitor)//In modalità 1, questo bit è 1 durante l'arresto per decelerazione, il resto è 0 B[11] (monitor)//In modalità 1, questo bit è 0 durante l'arresto per decelerazione e 1 quando finito
B[12] (monitor)//In modalità 1, questo bit è 1 durante la sequenza di sincronizzazione, il resto è 0 B[13] (monitor)//In modalità 1, questo bit è 0 durante la sequenza di sincronizzazione e 1 quando finito
_____________________________________________________________________________
AI[0] //Imposta il tempo di ciclo(ms) tipo galleggiante
AI[2] //Impostazione di molecole di ingranaggi elettronici tipo galleggiante
AI[4] // Impostazione del denominatore del cambio elettronico tipo galleggiante
AI[6] //Numero di impulsi percorsi dal mandrino durante la compensazione di tipo float Compila come richiesto
AI[8] //Numero di impulsi di compensazione di tipo float Compila come richiesto
DW[10] //Posizione del mandrino in arrivo tipo int
AI[12] //Impostazione della velocità del mandrino virtuale tipo galleggiante
DW[14] (monitoraggio)//Posizione mandrino Impulsi tipo int
DW[16] (monitor)//Posizione data tipo int
FW[18] (monitor)//Velocità teorica data tipo galleggiante
FW[20] (monitor)//Velocità mandrino calcolata tipo galleggiante
FW[22] (monitor)//Valore della posizione di compensazione A partire da 0 ogni volta tipo galleggiante
AI[24] // impostare KP tipo galleggiante
DW[26] //In entrata effettiva dalla posizione dell'asse tipo int
AI[28] //Imposta la massima velocità di compensazione tipo galleggiante
FW[30] (monitor)//Errore in tempo reale tipo galleggiante
FW[32] (monitor)//Velocità di compensazione in tempo reale tipo galleggiante
AI[34] //Trasmette una data velocità in tempo reale tipo galleggiante
AI[36] //Distanza di arresto per l'arresto per decelerazione in modalità 1, dove viene impostata la distanza di decelerazione dall'albero tipo galleggiante
AI[38] //Distanza consumata dal mandrino durante la ricerca della sincronizzazione in modalità 1 tipo galleggiante
AI[40] //In modalità 1, la distanza da percorrere dall'asse durante la sequenza di sincronizzazione tipo galleggiante
FW[42] //Il piccolo valore di V1 calcolato monitorando il secondo stato della sincronizzazione della sequenza in modalità 1 tipo galleggiante
FW[44] //Il valore elevato di V1 calcolato monitorando il secondo stato della sincronizzazione della sequenza in modalità 1 tipo galleggiante
FW[46] //Monitoraggio dei valori VO per la sincronizzazione della sequenza in modalità 1
tipo galleggiante
FW[48] //Nella modalità 1, monitora in quale ramo di elaborazione si trovano l'accelerazione e la decelerazione tipo int
FW[50] //Nella modalità 1 viene monitorata la posizione del mandrino
tipo galleggiante
FW[52] //In modalità 1, la distanza da percorrere dall'asse durante la sequenza di sincronizzazione tipo galleggiante
DW[60] //Generazione marcia elettronica per una data posizione
tipo int
FW[62] //La velocità data generata dal cambio elettronico, cioè 6034 senza compensazione tipo galleggiante
AI[70] //Impostazione di molecole di ingranaggi elettronici compensati tipo float
FW[72] //Emette solo la velocità data generata dal cambio elettronico D5502/D5504, al contrario del D5562.
D5562 è la velocità data generata da (D5502+D5570)/D5504 tipo galleggiante
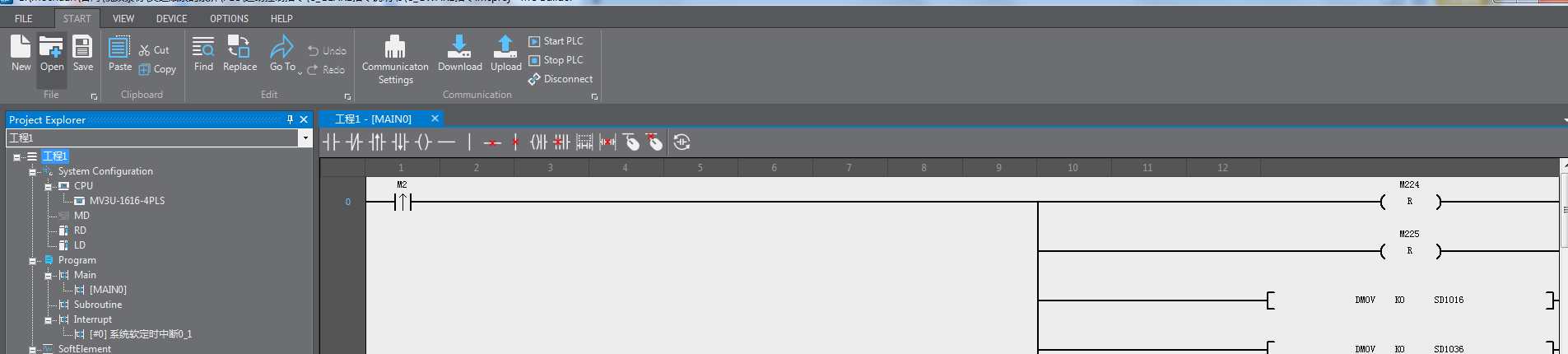
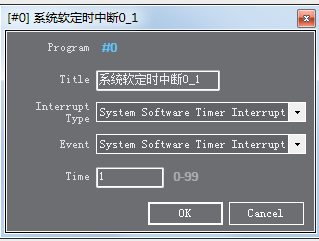
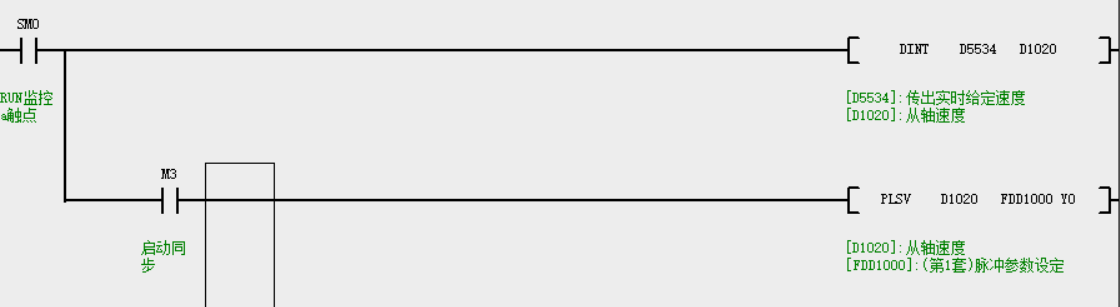
1. Questa istruzione deve trovarsi nell'interrupt del componente software del sistema e il periodo di esecuzione dell'istruzione deve essere lo stesso del parametro nel FW[0] esterno.
M3 può avviare questo comando
2. I parametri B[0], B[3] e B[7] devono essere impostati durante l'impostazione dei parametri bit
B[0] //Abilitazione cambio elettronico Dato continuamente 1 per eseguire l'intera funzione, dato 0 per sospendere la funzione.
B[3] //be 1 per abilitare il mandrino virtuale 1 per avviare l'asse virtuale, 0 per passare il valore effettivo dell'encoder a DW[10]
B[7] //Selezione modalità 0 per nessuna modalità di accelerazione/decelerazione, 1 per la modalità stop-start di accelerazione/decelerazione del cambio elettronico.
Il secondo, rimanente B[1]: l'attivazione di B[1] durante l'esecuzione dell'istruzione può essere compensata una volta. (La direzione della compensazione è determinata dai parametri in B[2])
B[1] //Esecuzione della compensazione I salti da 0 a 1 vengono compensati una volta (se il cambio elettronico è abilitato)
B[2] //Direzione di compensazione 1 per avanti 0 per indietro
Quando la modalità in B[7] è 0, il comando non può attivare la sincronizzazione dell'accelerazione e l'arresto della decelerazione.
Quando la modalità in B[7] è 1, il mandrino deve attivare B[9] per l'avvio accelerato e B[8] per l'arresto decelerato all'arresto.
B[8] //Segnale di avvio per arresto in decelerazione in modalità 1, (attivo sul fronte di salita)
B[9] //Nella modalità 1 viene attivato il segnale di avvio per la sincronizzazione del chase (fronte di salita attivo)
Tutti i bit rimanenti sono parametri di monitoraggio
B[4] (monitor) //Bit del flag di esecuzione della compensazione
B[5] (monitor)//Ci sono avvisi
B[10] (monitor)//In modalità 1, questo bit è 1 durante l'arresto per decelerazione, il resto è 0
B[11] (monitor)//Nella modalità 1, questo bit è 0 durante l'arresto per decelerazione e 1 al termine
B[12] (monitor)//In modalità 1, questo bit è 1 durante la sequenza di sincronizzazione, il resto è 0
B[13] (monitor)//Nella modalità 1, questo bit è 0 durante la sequenza di sincronizzazione e 1 al termine.
3. Impostazione dei parametri di Word
AI[0] //Imposta il tempo di ciclo(ms) tipo galleggiante
AI[2] //Impostazione di molecole di ingranaggi elettronici tipo galleggiante
AI[4] //Impostazione del denominatore dell'ingranaggio elettronico tipo galleggiante
FW[0]I parametri in questa sezione devono essere gli stessi impostati nell'interrupt del componente software
FW[2] e FW[4] rapporto tra assi master e slave impostato in base alle condizioni effettive
AI[6] //Numero di impulsi percorsi dal mandrino durante la compensazione float Digitare fill come richiesto
AI[8] //Numero di impulsi di compensazione float Tipo riempire come richiesto
FW[6] è il numero di impulsi che devono essere presi dall'asse master durante la compensazione, FW[8] è il numero di impulsi che devono essere compensati dall'asse slave
(Il numero di impulsi impostato in FW [8] deve essere compensato dall'asse entro i parametri impostati in FW [6])
DW[10] //Posizione del mandrino in arrivo tipo int
AI[12] //Impostazione della velocità del mandrino virtuale tipo galleggiante
AI[24] // impostare KP tipo galleggiante
DW[26] //In entrata effettiva dalla posizione dell'asse tipo int
AI[28] //Imposta la massima velocità di compensazione tipo galleggiante
DW [10] e FW [12] sono la posizione e la velocità del mandrino da inserire in tempo reale
DW [26] è la posizione dell'asse slave da inserire in tempo reale (per garantire la sincronizzazione del mandrino e dell'asse slave)
FW[24] è il rapporto tra accelerazione e decelerazione
FW[28] imposta la velocità massima di compensazione (una velocità di compensazione maggiore della velocità massima di compensazione attiverà B[5] nel comando)
AI[34] //Trasmette una data velocità in tempo reale tipo galleggiante
AI[36] //Distanza di arresto dall'asse all'arresto di decelerazione in modalità 1, tipo float
AI[38] //Distanza consumata dal mandrino durante la sequenza di sincronizzazione in modalità 1 float
AI[40] //In modalità 1, la distanza da percorrere dall'asse durante la sequenza di sincronizzazione float
FW[34] è la velocità dell'asse slave data dal comando (scritta nell'asse slave tramite il comando PLSV)
FW[36] è la distanza richiesta per decelerare dall'albero a 0 all'arresto della decelerazione
FW[38] e FW[38] sono il numero di impulsi che devono essere presi rispettivamente dagli assi master e slave durante la ricerca della sincronizzazione
AI[70] //Impostazione di molecole di ingranaggi elettronici compensati tipo galleggiante
Se necessario, il rapporto di trasmissione elettronico può anche essere compensato FW [70] direttamente al numeratore del rapporto di trasmissione elettronico