Mochuan MV serie plc GEAR1 descripción de la instrucción
ENGRANAJE1
C_GEAR1 Dn Minnesota
/**
segundo[0] //Habilitación equipo electrónico Da continuamente 1 para ejecutar toda la función, da 0 para pausar la función.
segundo[1] //Ejecución de la indemnización Los saltos de 0 a 1 se compensan una vez (con el engranaje electrónico habilitado)
segundo[2] //Dirección de compensación 1 para avanzar 0 para retroceder
B[3] //ser 1 para habilitar el eje virtual 1 para iniciar el eje virtual, 0 para pasar el valor real del codificador a DW[10]
B[4] (Monitor) //Bit indicador de ejecución de compensación
B[5] (monitor)//aqui un aviso
B[6] //Salto de 0 a 1, posición dada clara 0.
B[7] //Selección de modo 0 para modo sin aceleración/desaceleración, 1 para aceleración/desaceleración de engranaje electrónico parada inicio
B[8] //Señal de inicio para parada de deceleración en modo 1, flanco ascendente activo
B[9] //En el modo 1, la señal de inicio para iniciar la sincronización de persecución está activa en el flanco ascendente
B[10] (monitor)//En modo 1, este bit es 1 durante la parada de desaceleración, el resto es 0 B[11] (monitor)//En modo 1, este bit es 0 durante la parada de desaceleración y 1 cuando finalizado
B[12] (monitor)//En modo 1, este bit es 1 durante el chase de sincronización, el resto es 0 B[13] (monitor)//En modo 1, este bit es 0 durante el chase de sincronización y 1 cuando finalizado
_______________________________________________________________________________
FW[0] // Establecer tiempo de ciclo (ms) tipo flotante
AV[2] //Configuración de moléculas de engranajes electrónicos tipo flotante
AV[4] // Configuración del denominador del equipo electrónico tipo flotante
AV[6] //Número de pulsos recorridos por el husillo durante el tipo de flotación de compensación Rellene según sea necesario
AV[8] //Número de pulsos de compensación tipo float Rellene según sea necesario
DW[10] //Posición del husillo entrante tipo int
FW[12] //Configuración de la velocidad del eje virtual tipo flotante
DW[14] (monitor)//Posición del cabezal Impulsos tipo int
DW[16] (monitor) // Posición dada tipo int
FW[18] (monitor)//Velocidad dada teórica tipo flotante
FW[20] (monitor)//Velocidad de cabezal calculada tipo flotante
FW[22] (monitor)//Valor de posición de compensación Comenzando desde 0 cada vez tipo flotante
FW[24] // establecer KP tipo flotante
DW[26] //Entrante real desde la posición del eje tipo int
FW[28] //Establecer la velocidad máxima de compensación tipo flotante
FW[30] (monitor)//Error en tiempo real tipo flotante
FW[32] (monitor)//Velocidad de compensación en tiempo real tipo flotante
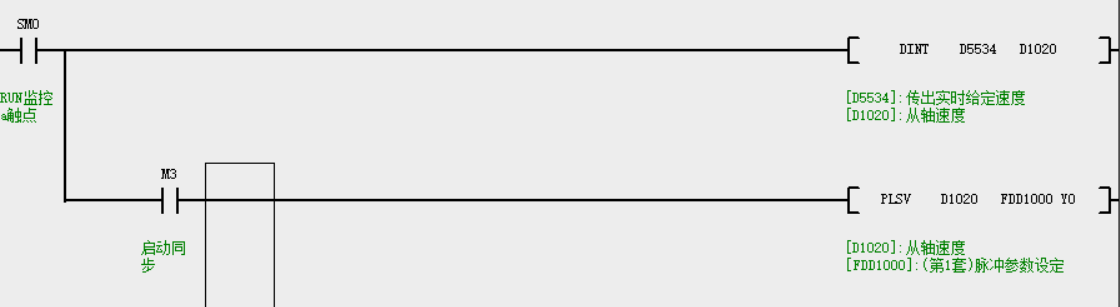
FW[34] //Transmite una velocidad dada en tiempo real tipo flotante
FW[36] //Distancia de parada para parada de desaceleración en el modo 1, donde se establece la distancia de desaceleración desde el eje tipo flotante
FW[38] //Distancia consumida por el cabezal durante el seguimiento de sincronización en modo 1 tipo flotante
FW[40] //En el modo 1, la distancia a recorrer desde el eje durante la persecución de sincronización tipo flotante
FW[42] //El pequeño valor de V1 calculado al monitorear el segundo estado de la sincronización de persecución en el modo 1 tipo flotante
FW[44] //El gran valor de V1 calculado al monitorear el segundo estado de la sincronización de persecución en el modo 1 tipo flotante
FW[46] //Monitoreo de valores VO para sincronización de persecución en modo 1
tipo flotante
FW[48] //En el modo 1, monitorea en qué rama de procesamiento se encuentra la aceleración y la desaceleración tipo int
FW[50] //En el modo 1 se supervisa la posición del cabezal
tipo flotante
FW[52] //En el modo 1, la distancia a recorrer desde el eje durante la persecución de sincronización tipo flotante
DW[60] //Generación electrónica de engranajes para una posición dada
tipo int
FW[62] //La velocidad dada generada por el equipo electrónico, es decir, 6034 sin compensación tipo flotante
FW[70] //Configuración del tipo de flotador de moléculas de engranajes electrónicos compensados
FW[72] //Emite solo la velocidad dada generada por el equipo electrónico D5502/D5504, a diferencia del D5562.
D5562 es la velocidad dada generada por (D5502+D5570)/D5504 tipo flotante
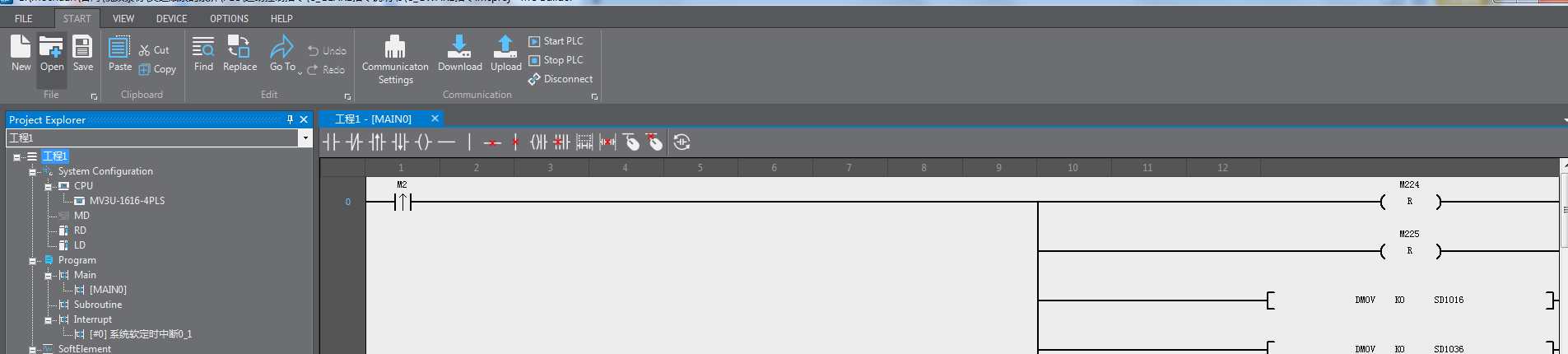
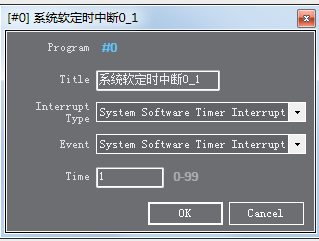
1. Esta instrucción debe estar en la interrupción del componente suave del sistema y el período de ejecución de la instrucción debe ser el mismo que el parámetro en el FW externo [0].
M3 puede iniciar este comando
2. Los parámetros B[0], B[3] y B[7] deben configurarse al configurar los parámetros de bit
segundo[0] //Habilitación del engranaje electrónico Continuamente dado 1 para ejecutar toda la función, dado 0 para suspender la función.
B[3] //sea 1 para habilitar el husillo virtual 1 para iniciar el eje virtual, 0 para pasar el valor real del codificador a DW[10]
B[7] //Selección de modo 0 para el modo sin aceleración/desaceleración, 1 para el modo de parada-arranque de aceleración/desaceleración del engranaje electrónico.
El segundo B[1] restante: la activación de B[1] durante la ejecución de la instrucción se puede compensar una vez. (La dirección de compensación está determinada por los parámetros en B[2])
segundo[1] //Ejecución de compensación Los saltos de 0 a 1 se compensan una vez (si está habilitado el engranaje electrónico)
segundo[2] //Dirección de compensación 1 para adelante 0 para atrás
Cuando el modo en B[7] es 0, el comando no puede activar la sincronización de aceleración y la parada de desaceleración.
Cuando el modo en B[7] es 1, el eje necesita activar B[9] para un inicio acelerado y B[8] para una parada desacelerada cuando se detiene.
B[8] //Señal de inicio para parada de deceleración en modo 1, (activa en flanco ascendente)
B[9] //En el modo 1, la señal de inicio para la sincronización de persecución está activada (flanco ascendente activo)
Todos los bits restantes son parámetros de monitoreo
B[4] (monitor) //Bit indicador de ejecución de compensación
B[5] (monitor)//¿Hay advertencias?
B[10] (monitor)//En modo 1, este bit es 1 durante la parada de desaceleración, el resto es 0
B[11] (monitor)//En modo 1, este bit es 0 durante la parada de desaceleración y 1 cuando finaliza
B[12] (monitor)//En modo 1, este bit es 1 durante el chase de sincronización, el resto es 0
B[13] (monitor)//En el modo 1, este bit es 0 durante la secuencia de sincronización y 1 cuando finaliza.
3. Configuración de parámetros de palabras
FW[0] // Establecer tiempo de ciclo (ms) tipo flotante
AV[2] //Configuración de moléculas de engranajes electrónicos tipo flotante
AV[4] //Configuración del denominador del equipo electrónico tipo flotante
FW[0]Los parámetros en esta sección deben ser los mismos que los establecidos en la interrupción del componente suave
Relación FW[2] y FW[4] entre los ejes maestro y esclavo establecida de acuerdo con las condiciones reales
AV[6] //Número de pulsos recorridos por el husillo durante la flotación de compensación Escriba el relleno según sea necesario
AV[8] //Número de pulsos de compensación float Tipo llenar según sea necesario
FW[6] es el número de pulsos que debe tomar el eje maestro durante la compensación, FW[8] es el número de pulsos que debe compensar el eje esclavo
(El número de pulsos establecido en FW [8] debe compensarse desde el eje dentro de los parámetros establecidos en FW [6])
DW[10] //Posición del husillo entrante tipo int
FW[12] //Configuración de la velocidad del eje virtual tipo flotante
FW[24] // establecer KP tipo flotante
DW[26] //Entrante real desde la posición del eje tipo int
FW[28] //Establecer la velocidad máxima de compensación tipo flotante
DW [10] y FW [12] son la posición del cabezal y la velocidad del cabezal que se introducirán en tiempo real
DW [26] es la posición del eje esclavo que se introducirá en tiempo real (para garantizar la sincronización del cabezal y el eje esclavo)
FW[24] es la relación entre aceleración y desaceleración
FW[28] establece la velocidad de compensación máxima (una velocidad de compensación superior a la velocidad de compensación máxima activará B[5] en el comando)
FW[34] //Transmite una velocidad dada en tiempo real tipo flotante
FW[36] //Distancia de parada desde el eje en parada de desaceleración en modo 1, tipo flotante
FW[38] //Distancia consumida por el cabezal durante el chase de sincronización en modo 1 float
FW[40] //En el modo 1, la distancia a recorrer desde el eje durante la sincronización de chase float
FW[34] es la velocidad del eje esclavo dada por el comando (escrito en el eje esclavo por medio del comando PLSV)
FW[36] es la distancia requerida para desacelerar desde el eje hasta 0 en la parada de desaceleración
FW[38] y FW[38] son el número de pulsos que deben tomar los ejes maestro y esclavo respectivamente cuando persiguen la sincronización
FW[70] //Configuración de moléculas de engranajes electrónicos compensados tipo flotante
Si es necesario, la relación de transmisión electrónica también se puede compensar FW [70] directamente al numerador de relación de transmisión electrónica