Mochuan série MV plc GEAR1 description de l'instruction
VITESSE1
C_GEAR1 Dn Mn
/**
B[0] //Activation de l'équipement électronique Donnez continuellement 1 pour exécuter toute la fonction, donnez 0 pour mettre la fonction en pause.
B[1] //Exécution de l'indemnisation Les sauts de 0 à 1 sont compensés une fois (avec la transmission électronique activée)
B[2] //Sens de compensation 1 pour la marche avant 0 pour la marche arrière
B[3] //être 1 pour permettre à la broche virtuelle 1 de démarrer l'axe virtuel, 0 pour faire passer la valeur réelle du codeur à DW[10]
B[4] (Moniteur) //Bit drapeau d'exécution de la compensation
B[5] (surveiller)//ici un avertissement
B[6] // Saut de 0 à 1, étant donné la position claire 0.
B[7] //Sélection du mode 0 pour aucun mode d'accélération/décélération, 1 pour l'accélération/décélération de l'engrenage électronique stop start
B[8] //Signal de démarrage pour l'arrêt de la décélération en mode 1, front montant actif
B[9] //En mode 1, le signal de démarrage pour démarrer la synchronisation de poursuite est actif sur le front montant
B[10] (monitor)//En mode 1, ce bit est à 1 pendant l'arrêt en décélération, le reste est à 0 B[11] (monitor)//En mode 1, ce bit est à 0 pendant l'arrêt en décélération et à 1 fini
B[12] (monitor)//En mode 1, ce bit est à 1 pendant le chase de synchronisation, le reste est à 0 B[13] (monitor)//En mode 1, ce bit est à 0 pendant le chase de synchronisation et à 1 quand fini
_________________________________________________________________________________
Micrologiciel[0] //Définir le temps de cycle (ms) flotteur
Micrologiciel[2] //Mise en place de molécules d'engrenages électroniques flotteur
Micrologiciel[4] // Réglage du dénominateur du rapport électronique flotteur
Micrologiciel[6] //Nombre d'impulsions parcourues par la broche lors d'une compensation de type float Remplir au besoin
Micrologiciel[8] //Nombre d'impulsions de compensation de type flottant Remplir au besoin
DW[10] //Position broche entrante type entier
Micrologiciel[12] //Réglage de la vitesse de la broche virtuelle flotteur
DW[14] (moniteur)//Position broche Impulsions type entier
DW[16] (moniteur)//Position donnée type entier
FW[18] (moniteur)//Vitesse donnée théorique flotteur
FW[20] (moniteur)//Vitesse de broche calculée flotteur
FW[22] (moniteur)//Valeur de position de compensation Commençant à chaque fois à partir de 0 flotteur
FW[24] // définir KP flotteur
DW[26] //Réel entrant de la position de l'axe type entier
FW[28] //Définir la vitesse de compensation maximale flotteur
FW[30] (moniteur)//Erreur en temps réel flotteur
FW[32] (moniteur)//Vitesse de compensation en temps réel flotteur
FW[34] // Transmet une vitesse donnée en temps réel flotteur
FW[36] // Distance d'arrêt pour l'arrêt de décélération en mode 1, où la distance de décélération à partir de l'arbre est définie flotteur
FW[38] //Distance consommée par la broche lors de la poursuite de la synchronisation en mode 1 flotteur
FW[40] //En mode 1, la distance à parcourir depuis l'axe pendant le chase de synchronisation flotteur
FW[42] //La petite valeur de V1 calculée en surveillant le deuxième état de la synchronisation de poursuite en mode 1 flotteur
FW[44] //La grande valeur de V1 calculée en surveillant le deuxième état de la synchronisation de poursuite en mode 1 flotteur
FW[46] //Surveillance des valeurs VO pour la synchronisation de poursuite en mode 1
flotteur
FW[48] // En mode 1, surveillez dans quelle branche de traitement se trouvent l'accélération et la décélération type entier
FW[50] //En mode 1, la position de la broche est surveillée
flotteur
FW[52] //En mode 1, la distance à parcourir depuis l'axe pendant le chase de synchronisation flotteur
DW[60] // Génération électronique d'engrenages pour une position donnée
type entier
FW[62] //La vitesse donnée générée par le réducteur électronique, c'est-à-dire 6034 sans compensation flotteur
FW[70] //Mise en place de molécules d'engrenages électroniques compensées de type flotteur
FW[72] //Sortie uniquement la vitesse donnée générée par le réducteur électronique D5502/D5504, par opposition au D5562.
D5562 est la vitesse donnée générée par (D5502+D5570)/D5504 flotteur
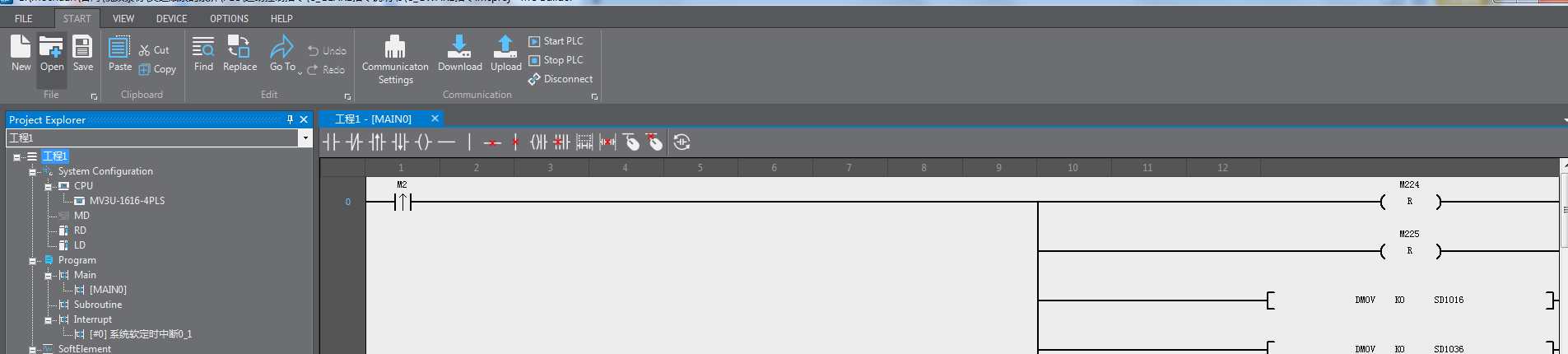
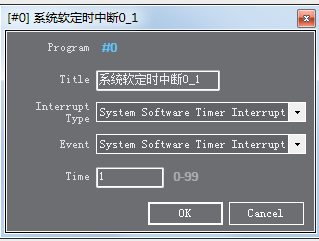
1. Cette instruction doit être dans l'interruption du composant logiciel du système et la période d'exécution de l'instruction doit être la même que le paramètre dans le FW externe [0].
M3 peut lancer cette commande
2. Les paramètres B[0], B[3] et B[7] doivent être définis lors de la définition des paramètres de bit
B[0] //Activation de l'engrenage électronique Donné en continu 1 pour exécuter toute la fonction, donné 0 pour suspendre la fonction.
B[3] //être 1 pour permettre à la broche virtuelle 1 de démarrer l'axe virtuel, 0 pour passer la valeur réelle du codeur à DW[10]
B[7] //Sélection du mode 0 pour le mode sans accélération/décélération, 1 pour le mode d'arrêt-démarrage de l'accélération/décélération de l'engrenage électronique.
Le second B[1] restant : le déclenchement de B[1] pendant l'exécution de l'instruction peut être compensé une fois. (La direction de la compensation est déterminée par les paramètres dans B[2])
B[1] //Exécution de la compensation Les sauts de 0 à 1 sont compensés une fois (si le réducteur électronique est activé)
B[2] //Sens de compensation 1 pour l'avant 0 pour l'arrière
Lorsque le mode dans B[7] est 0, la commande ne peut pas déclencher la synchronisation de l'accélération et l'arrêt de la décélération.
Lorsque le mode dans B[7] est 1, la broche doit déclencher B[9] pour un démarrage accéléré et B[8] pour un arrêt décéléré lors de l'arrêt.
B[8] //Signal de démarrage pour l'arrêt de la décélération en mode 1, (actif sur le front montant)
B[9] //En mode 1, le signal de démarrage pour la synchronisation de poursuite est activé, (front montant actif)
Tous les bits restants sont des paramètres de surveillance
B[4] (moniteur) //Bit drapeau d'exécution de la compensation
B[5] (surveiller)//Y a-t-il des avertissements
B[10] (moniteur)//En mode 1, ce bit est à 1 pendant l'arrêt en décélération, le reste est à 0
B[11] (moniteur)//En mode 1, ce bit est à 0 pendant l'arrêt de décélération et à 1 une fois terminé
B[12] (monitor)//En mode 1, ce bit est à 1 pendant le chase de synchronisation, le reste est à 0
B[13] (moniteur)//En mode 1, ce bit est à 0 pendant le chenillard de synchronisation et à 1 une fois terminé.
3.Paramètre de mot
Micrologiciel[0] //Définir le temps de cycle (ms) flotteur
Micrologiciel[2] //Mise en place de molécules d'engrenages électroniques flotteur
Micrologiciel[4] //Définition du dénominateur de vitesse électronique flotteur
FW[0]Les paramètres de cette section doivent être les mêmes que ceux définis dans l'interruption du composant logiciel
Rapport FW[2] et FW[4] entre les axes maître et esclave réglés en fonction des conditions réelles
Micrologiciel[6] //Nombre d'impulsions parcourues par la broche pendant le flottement de compensation Type de remplissage selon les besoins
Micrologiciel[8] //Nombre d'impulsions de compensation float Type remplir au besoin
FW[6] est le nombre d'impulsions à prendre par l'axe maître pendant la compensation, FW[8] est le nombre d'impulsions à compenser par l'axe esclave
(Le nombre d'impulsions défini dans FW [8] doit être compensé à partir de l'axe dans les paramètres définis dans FW [6])
DW[10] //Position broche entrante type entier
Micrologiciel[12] //Réglage de la vitesse de la broche virtuelle flotteur
FW[24] // définir KP flotteur
DW[26] //Réel entrant de la position de l'axe type entier
FW[28] //Définir la vitesse de compensation maximale flotteur
DW [10] et FW [12] sont la position et la vitesse de broche à entrer en temps réel
DW [26] est la position de l'axe esclave à entrer en temps réel (pour assurer la synchronisation de la broche et de l'axe esclave)
FW[24] est le rapport de l'accélération à la décélération
FW[28] définit la vitesse de compensation maximale (une vitesse de compensation supérieure à la vitesse de compensation maximale activera B[5] dans la commande)
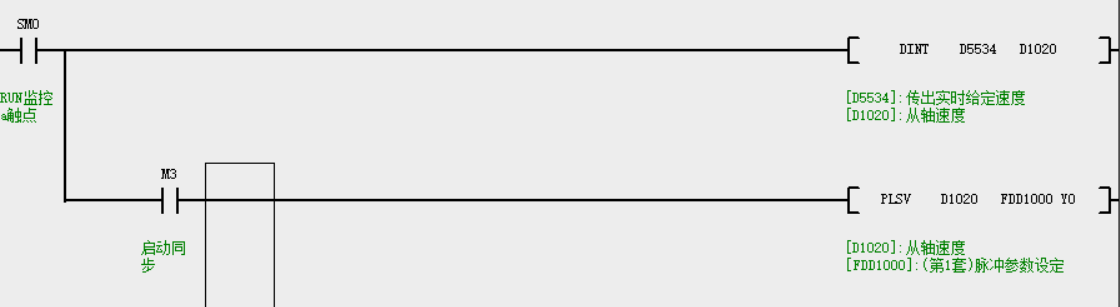
FW[34] // Transmet une vitesse donnée en temps réel flotteur
FW[36] //Distance d'arrêt de l'axe à l'arrêt de décélération en mode 1, type flottant
FW[38] //Distance consommée par la broche pendant le chase de synchronisation en mode 1 float
FW[40] //En mode 1, la distance à parcourir depuis l'axe lors du chase de synchronisation float
FW[34] est la vitesse de l'axe esclave donnée par la commande (écrite dans l'axe esclave au moyen de la commande PLSV)
FW[36] est la distance nécessaire pour décélérer de l'arbre à 0 à l'arrêt de décélération
FW[38] et FW[38] sont le nombre d'impulsions à prendre respectivement par les axes maître et esclave lors de la poursuite de la synchronisation
FW[70] //Mise en place de molécules d'engrenages électroniques compensées flotteur
Si nécessaire, le rapport de transmission électronique peut également être compensé FW [70] directement sur le numérateur du rapport de transmission électronique